![Příklad automatické detekce osob z videozáznamu databáze MOTChallenge [15] algoritmem YOLO [10] v nádražní budově s procentuální spolehlivostí detekce](/images/NDgyNng5OTJ4MA==/vut03_rgb+16x9.jpg) Příklad automatické detekce osob z videozáznamu databáze MOTChallenge [15] algoritmem YOLO [10] v nádražní budově s procentuální spolehlivostí detekce
Příklad automatické detekce osob z videozáznamu databáze MOTChallenge [15] algoritmem YOLO [10] v nádražní budově s procentuální spolehlivostí detekce

Článek nabízí nový přístup k analýze bezpečnostních rizik při mimořádných událostech v rámci dopravních uzlů, s cílem minimalizace jejich negativních dopadů. Navazuje na standardní metody založené na normových výpočtech a numerických evakuačních modelech a navrhuje využití metod hlubokého učení k analýze probíhající v reálném čase. V článku je stručně popsán princip umělých neuronových sítí a představeno několik příkladů jejich využití v tomto oboru.
1 ÚVOD
V návaznosti na rostoucí politickou podporu a propagaci veřejné hromadné dopravy lze očekávat stále větší obsazenost dopravních uzlů [1]. To je motivací ke vzniku řady projektů na celém území ČR, jejichž cílem je mimo jiné v rámci rekonstrukce zvýšit kapacitu daného dopravního uzlu. Tato skutečnost však vytváří nároky na zajištění bezpečného užívání těchto staveb jejich provozovateli. Objekty s vysokou koncentrací osob a nízkou úrovní zabezpečení se obecně označují jako měkké cíle. Dle této definice mezi ně bezpochyby patří i dopravní uzly. Příkladem těchto objektů jsou nádražní budovy, letištní terminály nebo stanice metra. Ministerstvo vnitra představilo v roce 2017 koncepci ochrany měkkých cílů v níž uvádí, že 53 % teroristických útoků v letech 2008 – 2014 bylo směřováno právě na kategorii měkkých cílů [2].
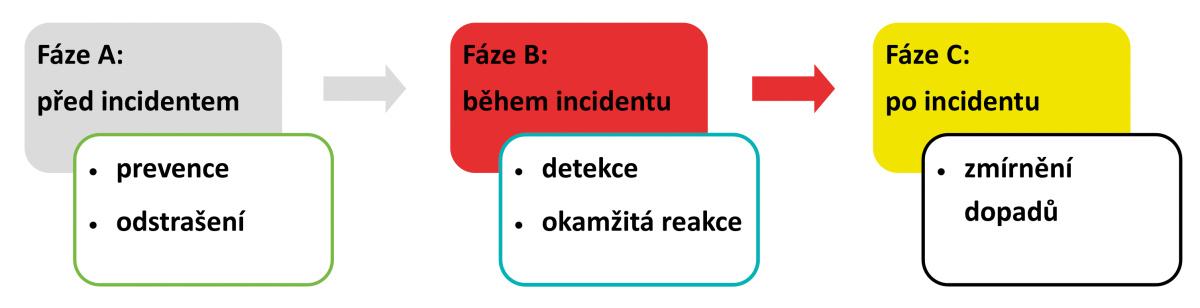
Na obr. 1 jsou zachyceny tři hlavní fáze typické mimořádné události a činnosti, které se k ní vážou. Vyjdeme-li při hodnocení bezpečnostních rizik ze skutečnosti, že navzdory nutné prevenci není možné v současné době výše zmíněným incidentům efektivně zabránit, přirozeně lze přesunout pozornost k minimalizaci dopadů těchto potenciálních nebezpečí, tedy k fázi C. Ty se projeví v nastalé evakuaci, jejíž průběh závisí na celé řadě faktorů (např. charakteru útoku, typu objektu, genderovém složení populace, výcviku personálu apod.). Relativně rychlý vývoj metod hlubokého učení v posledních letech umožňuje zefektivnit fázi B a poskytnout provozovateli a bezpečnostním složkám informace o situaci objektu v reálném čase. Současné možnosti nasazení těchto algoritmů v čase mimořádné události jsou předmětem tohoto článku.
2 PŘÍSTUPY K POSUZOVÁNÍ EVAKUAČNÍHO PROCESU
Požárně bezpečnostní řešení stavby (dále PBŘ) je součástí projektových dokumentací veškerých staveb označovaných jako měkké cíle. PBŘ garantuje na základě normových výpočtů bezpečné prostředí na únikových cestách po dobu potřebnou pro evakuaci. V literatuře se tato doba označuje jako Required Safe Egress Time (dále RSET) [3] . Tato garance však z logiky věci platí pro stavbu ve stavu a provozním nastavení, které odpovídá její projektové dokumentaci. Ze své podstaty však nemůže tento normový přístup zohlednit podmínky evakuace proměnné v čase (např. aktuální počet osob, hustotu, věkové složení populace atd.), případně nežádoucí antropogenní faktor (např. přítomnost aktivního střelce nebo znepřístupnění dveří na únikových cestách). Zároveň jsou normové výpočty RSET neefektivní vzhledem ke komplexnosti evakuačního procesu a nejsou schopny postihnout fyzikální a behaviorální jevy, ke kterým při davovém pohybu osob dochází (např. reakční dobu [4], rozdělení rychlosti pohybu osob, šířku ramen, hustotu danou interakcemi mezi osobami, tvorbu řadových formací [5] atd.).
Pro tyto účely jsou v posledních letech normové výpočty nahrazovány inženýrským přístupem – numerickými evakuačními modely. Tento alternativní postup kodex požárních norem umožňuje. Numerické modely jsou do určité míry schopné pomocí simulací popsat fyzikální a behaviorální jevy a poskytnout tak přesnější charakteristiku evakuačního procesu, zejména v podobě popisných statistik a teplotních map. Pokročilejší z nich zároveň umožňují integraci výstupů modelu požáru do evakuačního modelu [6] a zohlednit tak například frakční účinnou dávku, tedy míru expozice osoby zplodinám hoření. Výstupy simulací lze následně zohlednit v kvantitativní analýze bezpečnostních rizik a aktualizovat strategii, která by měla vést ke snížení negativních dopadů mimořádné události.
3 LIMITY NUMERICKÝCH EVAKUAČNÍCH MODELŮ
Současné využití evakuačních modelů v inženýrské praxi spočívá především ve fázi návrhu stavby, kdy je pomocí modelů možné ověřit různé dispoziční návrhy nebo dodatečné úpravy v případě rekonstrukcí. Zároveň je možné posoudit různé scénáře průběhu evakuace (např. zablokování některého únikového východu útočníkem). Výstupy modelu jsou následnou součástí PBŘ. Jednou z klíčových veličin evakuačního procesu je RSET. Stochastické evakuační modely používají metodu Monte Carlo pomocí níž je realizována sada simulací s pseudonáhodnými čísly, které lze následně statisticky vyhodnotit. Pro stanovení minimálního nutného počtu simulací zavedl Ronchi metodu analýzy konvergence RSET, její směrodatné odchylky, euklidovské vzdálenosti první derivace evakuačních časů osob napříč simulacemi, jejich euklidovské projekce a vzdálenosti. Pro každou z těchto metrik je definována limitní hodnota, na základě které je určen počet simulací pro daný scénář [7].
Jak již bylo zmíněno, výše uvedený postup je používán především při posuzování staveb v projektové fázi. Pokud by měly evakuační modely ve fázi užívání stavby poskytovat validní odhady v reálném čase (např. RSET nebo hustoty), je jejich spolehlivost problematická vzhledem k proměnlivým vstupním údajům, zejména počtu osob, jejich pozici a výpočetnímu času. Pokud by uživatel modelu v čase mimořádné události zadal do modelu aktuální vstupní parametry a spustil simulaci, výsledky by pravděpodobně získal v čase, kdy pro adekvátní reakci na danou událost přestanou mít význam. Logickým krokem navazujícím na dosavadní poznatky uvedené výše je zkoumání možností efektivního využití numerických modelů nikoliv pouze ve fázi C, ale pro okamžitou detekci a reakci na mimořádnou událost (fáze B).
4 HLUBOKÉ UČENÍ
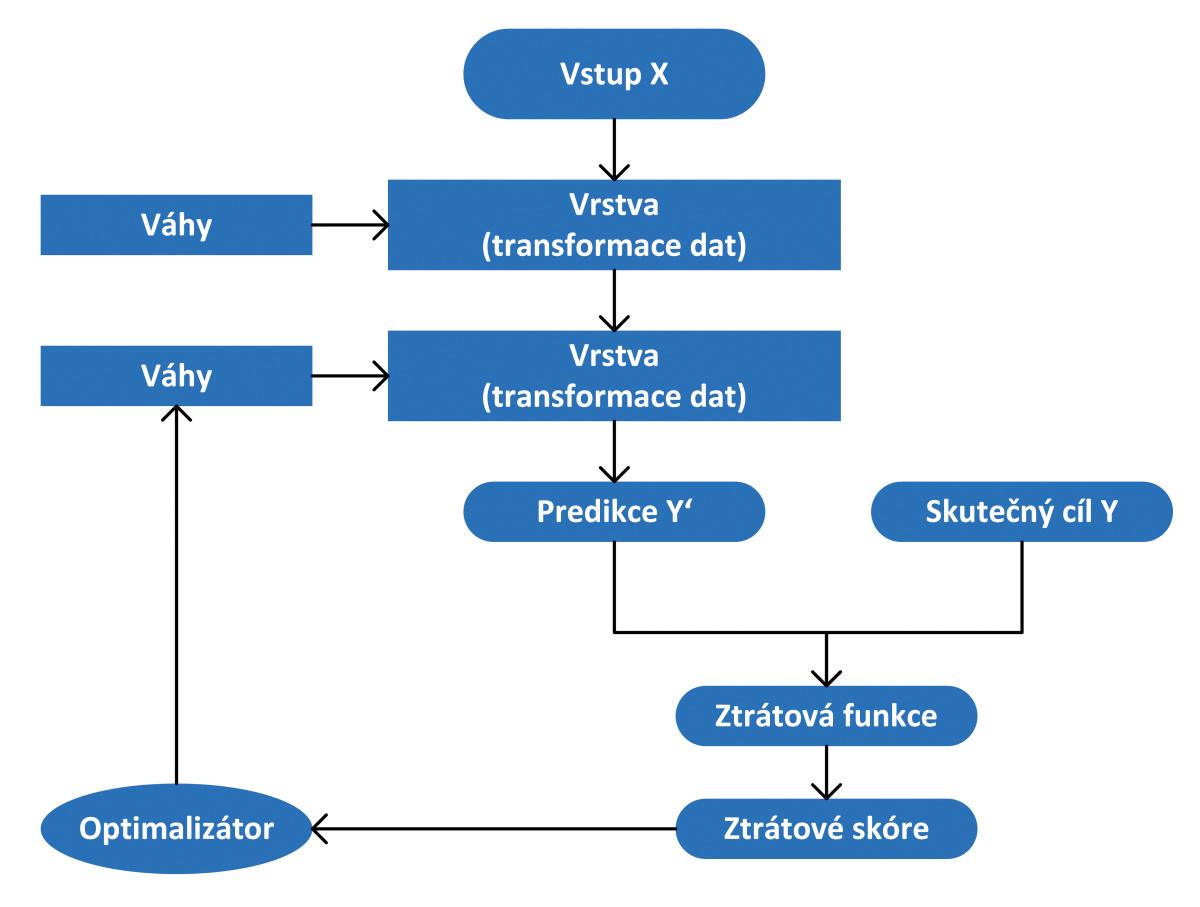
Metody hlubokého učení využívající umělé neuronové sítě (ANN) v posledních letech pronikají do stále více oblastí. Jedná se o algoritmy inspirované biologickými strukturami – neurony, které si mezi sebou předávají informace. Ty jsou následně transformovány pomocí přenosových funkcí. Každý neuron má libovolný počet vstupů, které jsou ohodnoceny váhami. Uvnitř neuronu probíhá výpočet tzv. potenciálu (vážené sumy vektoru vstupních dat a biasu) a výstupu neuronu pomocí aktivační funkce. Trénovací proces ANN je popsán na obr. 2. Při tréninku dochází k porovnání predikované hodnoty s hodnotou skutečnou a pro každou predikci je počítáno ztrátové skóre. Na základě této hodnoty dochází k optimalizaci vah a nové predikci. Pro tuto optimalizaci se hojně používá metoda sestupu gradientu, která hledá lokální minimum křivky ztrátové funkce pomocí derivace. Postup se iterativně opakuje, dokud není ztrátové skóre na přijatelné hladině.
Neurony jsou uspořádány ve vrstvách jejichž počet (stejně jako počet neuronů) je libovolný z hlediska funkčnosti, avšak z hlediska přesnosti predikcí má návrh architektury sítě cíl minimalizovat zvolenou ztrátovou funkci, která přesnost popisuje.
Pro optimální návrh architektury se v praxi využívají algoritmy [9], které testují rozsáhlou sadu možných architektur sítě a dle ztrátového skóre volí optimální architekturu (tzv. hyperparameter tuning). Tyto algoritmy se liší zejména výpočetní náročností. Hlubokým učením lze řešit úlohy klasifikační (např. klasifikace obrazu nebo detekce objektů), regresní (např. predikce vývoje cen akcií) a shlukovací (tvorba skupin v neoznačených datech). Jedná se o veškeré kategorie úloh řešitelné strojovým učením, tedy nadstavbou hlubokého učení.
5 MOŽNOSTI VYUŽITÍ HLUBOKÉHO UČENÍ VE FÁZI PRŮBĚHU INCIDENTU
5.1 Monitorování kritických lokalit z hlediska hustoty
Využití metody konvolučních neuronových sítí (CNN) umožňuje natrénovat síť na rozsáhlé množině obrázků s chodci, na základě které bude síť schopna detekovat osoby na videozáznamu a zapisovat jejich souřadnice v reálném čase. Tento proces v sobě zahrnuje detekci osob, transformaci pixelových souřadnic do lokálního (případně světového) souřadného systému a algoritmus potlačení distorze čočky kamery. Přesnost detekce naráží na úskalí zejména v situaci překryvu několika chodců nebo překryvu chodce se statickým objektem (např. nábytkem). V těchto situacích, kdy se v zorném poli kamery pohybuje větší množství chodců, často dochází ke ztrátě pozice osoby, případně jejímu zkreslení. Mezi nejpokročilejší algoritmy pro detekci objektů z videozáznamu patří YOLO [10], Retina-Net [11], Faster R-CNN [12], SSD [13] nebo Refine-Det [14].
5.2 Predikce RSET
V kombinaci s numerickými evakuačními modely mají algoritmy hlubokého učení potenciál predikovat RSET v reálném čase na základě časoprostorových dat v daném objektu. Na základě trénovací množiny simulací je teoreticky možné predikovat výstupy numerického modelu v reálném čase a vyhnout se tak časově náročné simulaci. Informace o RSET v čase mimořádné události, případně jejím vývoji, může přispět k efektivitě zásahu složek IZS. Tento koncept je však nutné podrobit důkladné validaci a je předmětem současného výzkumu.
5.3 Inteligentní evakuační značení
Dosavadní poznatky v oblasti evakuací prokazují tzv. “re-tracing”, tedy tendenci lidí evakuovat se v neznámém objektu trasou, kterou v objektu absolvovali a znají ji, bez ohledu na to, zda je zvolená trasa optimální z hlediska evakuačního času [16]. Známým příkladem tohoto jevu je požár z roku 1990, kde při evakuaci nočního klubu došlo k přetížení hlavního exitu, zatímco zbylé exity byly využity minimálně. Tato skutečnost spolu s dalšími přispěla k dramatickému nárůstu celkové doby evakuace, což mělo tragické následky se 100 oběťmi na životech [17]. Tato problematika je předmětem současného výzkumu. Například Xue a kol. řeší možnosti využití CNN v oblasti inteligentního evakuačního značení, které se dynamicky mění na základě časoprostorových dat z kamer a navádí osoby k exitu, který je v dané situaci optimální [18]. Peng a kol. představil algoritmus hledající optimální trasu z budovy pomocí ANN [19]. Seokyoung se zabývá optimalizací evakuačních tras pomocí zpětnovazebního učení (tzv. Reinforcement Learning), kde dochází při predikci k udělení zpětné vazby v podobě odměny a podle její hodnoty se algoritmus učí a postupně nalézá optimální řešení [20].
5.4 Detekce anomálií v davu
Předmětem současného výzkumu je také detekce pohybových anomálií. Bažout a kol. představil metodu využívající ANN pro detekci neobvyklého chování v davu (např. pád skupiny lidí k zemi). Síť je navržena, tak aby byla schopna reagovat na zcela novou situaci, bez nutnosti předchozího tréninku – učí se na nových datech. Praktické využití spočívá zejména v součinnosti s dronem, který z výšky snímá postupující dav. Videozáznam je následně zaslán na lokální server, kde je analyzován a dispečerovi je zobrazena výsledná teplotní mapa snímané scény se zvýrazněnými anomáliemi [21].
6 ZÁVĚR
V blízké budoucnosti lze očekávat nárůst kapacity a obsazenosti dopravních uzlů, což s sebou nese nároky na zajištění jejich bezpečného užívání. Numerické modely pohybu osob, jako alternativní přístup k posuzování evakuačního procesu, prokazují využití zejména ve fázi návrhu staveb nebo rekonstrukcí. Umožňují analyzovat různé návrhy stavebního řešení a scénáře mimořádné události s cílem zefektivnění evakuačního procesu, a tedy snížení negativních dopadů. Výstupy těchto modelů jsou však závislé na výpočetním čase simulací a kvalitě vstupních dat, které jsou proměnlivé v čase. Využití těchto modelů v čase mimořádné události je tedy v současné době neefektivní. S relativně rychlým vývojem metod hlubokého učení se stále rozšiřuje potenciál jejich využití v oblasti zajištění bezpečnosti měkkých cílů v reálném čase. V článku byly zmíněny možnosti jejich nasazení v oblasti predikce RSET, monitorování a detekce mimořádné události a inteligentního evakuačního značení. Každá z těchto aplikací je předmětem současného výzkumu a v budoucnu lze očekávat jejich nasazení v provozování měkkých cílů.
Ing. Ondřej Uhlík
Ing. Martina Kratochvílová
Ing. Lucie Dobiášová
Vysoké učení technické v Brně, Fakulta stavební
PODĚKOVÁNÍ
Článek vznikl za podpory projektů specifického výzkumu FAST-J-20-6454 Časoprostorová analýza kongescí při evakuaci a FAST-J-21-7522 Evakuace provizorních nemocnic s využitím modelu evakuace.
REFERENCE:
[1] MINISTERSTVO DOPRAVY. Koncepce veřejné dopravy 2020 – 2025 s výhledem do roku 2030. Praha, 2020.
[2] SOFT TARGETS PROTECTION INSTITUTE. Základy ochrany měkkých cílů. 1. Ministerstvo vnitra, 2017.
[3] Engineering Data.
[4] LOVREGLIO, Ruggiero, Erica KULIGOWSKI, Steve GWYNNE a Karen BOYCE. A pre-evacuation database for use in egress simulations. Fire Safety Journal. 2019, 105, 107 – 128. ISSN 0379-7112. Dostupné z: doi://doi.org/10.1016/j.firesaf.2018.12.009
[5] SCHADSCHNEIDER, Andreas, Wolfram KLINGSCH, Hubert KLÜPFEL, Tobias KRETZ, Christian ROGSCH a Armin SEYFRIED. Evacuation Dynamics: Empirical Results, Modeling and Applications. Encyclopedia of Complexity and Systems Science. Springer, 2009. Dostupné z: doi:10.1007/978-0-387-30440-3_187
[6] THORNTON, Charles, Richard O’KONSKI, B. HARDEMAN a Daniel SWENSON. Pathfinder: An Agent-Based Egress Simulator. 2011. Dostupné z: doi:10.1007/978-1-4419-9725-8_94
[7] RONCHI, Enrico, Paul A. RENEKE a Richard PEACOCK. A Method for the Analysis of Behavioural Uncertainty in Evacuation Modelling. Fire Technology. 2014, (50), 1 545 – 1 571.
[8] CHOLLET, Francois. Deep learning v jazyku Python. 1. Praha: Grada, 2019. ISBN 978-80-271-2751-1.
[9] O‘MALLEY, Tom, Elie BURSZTEIN, James LONG a Francois CHOLLET. KerasTuner. Dostupné z: https://github.com/keras-team/keras-tuner, 2019.
[10] REDMON, Joseph, Santosh DIVVALA, Ross GIRSHICK a Ali FARHADI. You Only Look Once: Unified, Real-Time Object Detection. Conference: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2016. Dostupné z: doi:10.1109/CVPR.2016.91
[11] LIN, Tsung-Yi, Priya GOYAL, Kaiming HE a Piotr DOLLÁR. Focal Loss for Dense Object Detection. In: IEEE Transactions on Pattern Analysis and Machine Intelligence. 2020, s. 318 – 327. Dostupné z: doi:10.1109/TPAMI.2018.2858826
[12] REN, Shaoqing, Kaiming HE, Ross GIRSHICK a Jian SU. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In: IEEE Transactions on Pattern Analysis and Machine Intelligence. 2015. Dostupné z: doi:10.1109/TPAMI.2018.2858826
[13] LIU, Wei, Dragomir ANGULEOV, Dumitru ERHAN, Christian SZEGEDY, Scott REED a Cheng-Yang FU. SSD: Single Shot MultiBox Detector. In: European Conference on Computer Vision. 2016. Dostupné z: doi:10.1007/978-3-319-46448-0_2
[14] ZHANG, Shifeng, Longyin WEN, Zhen LEI a Stan Z. LI. RefineDet++: Single-Shot Refinement Neural Network for Object Detection. In: IEEE Transactions on Circuits and Systems for Video Technology. 2020. Dostupné z: doi:10.1109/TCSVT.2020.2986402
[15] LEAL-TAIXÉ, Laura, Anton MILAN, Ian REID, Stefan ROTH a Konrad SCHINDLER. MOTChallenge 2015: Towards a Benchmark for Multi- -Target Tracking. Dostupné z: http://arxiv.org/abs/1504.01942, 2015.
[16] PROULX, G. Occupant behaviour and evacuation. Proceedings of the 9th International Fire Protection Symposium. 2001.
[17] GROSSHANDLER, W., Nelson BRYNER, Daniel MADRZYKOWSKI a Kuntz KENNETH. Report of the Technical Investigation of The Station Nightclub Fire. National Institute of Standards and Technology, 2005.
[18] XUE, Yiran, Rui WU, Jiafeng LIU a Xianglong TANG. Crowd Evacuation Guidance Based on Combined Action Reinforcement Learning. Algorithms. MDPI, 2021. Dostupné z: doi:10.3390/a14010026
[19] PENG, Yang, Sun-Wei LI a Zhen-Zhong HU. A self-learning dynamic path planning method for evacuation in large public buildings based on neural networks. Neurocomputing. 2019. Dostupné z: doi:10.1016/j.neucom.2019.06.099
[20] HONG, Seokyoung, Kyojin JANG, Jiheon LEE, Hyungjoon YOON, Hyungtae CHO a Il MOON. Optimal Evacuation Route Prediction in Fpso Based on Deep Q-Network. Computer Aided Chemical Engineering. Elsevier, 2020, (48). ISSN 1570-7946. Dostupné z: doi:10.1016/B978-0-12-823377-1.50312-8
[21] BAŽOUT, David a Vítězslav BERAN. Detekce anomálií na obrazovém záznamu z dronu: Technická zpráva. Brno: Vysoké Učení Technické v Brně, 2019.